SPI、CAN通讯原理

触发器的D脚是数据的输入端,假如当前为1;此时CLK脉冲为低电平时,将D脚的数据1读入到芯片,当CLK脉冲为高电平时,将芯片内的1数据输出到Q脚;
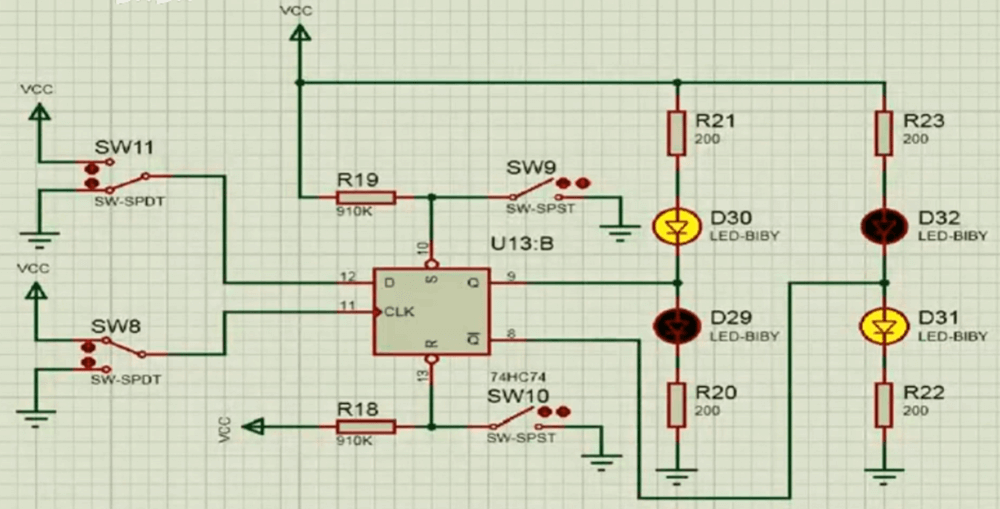
串行数据转并行数据【D触发器】,数据的接收接RXD
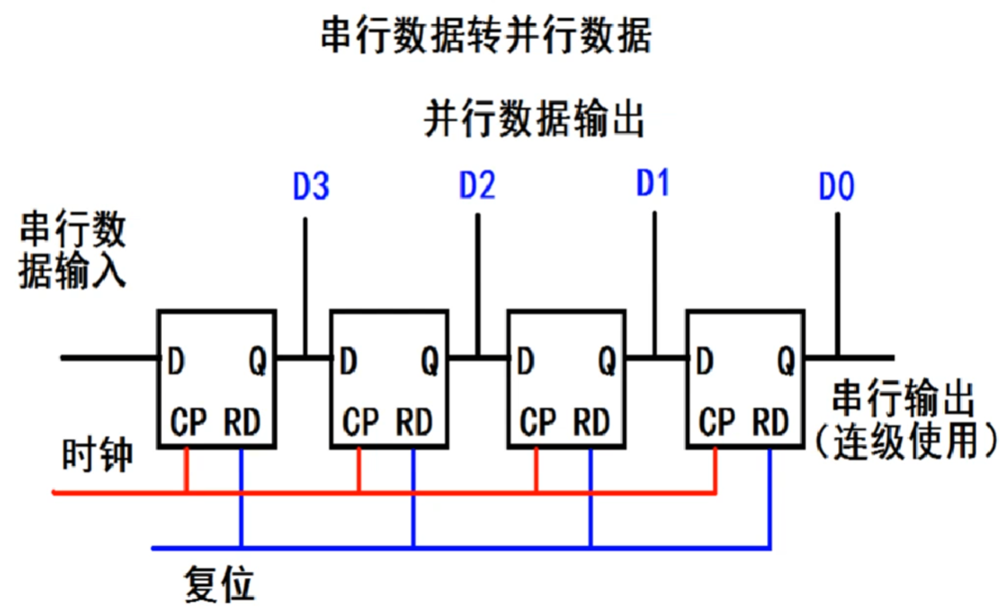
并行数据转串行数据,数据的发送。TXD

数据的发送与接收工作示意图【并行的数1101通过串行输出1101】

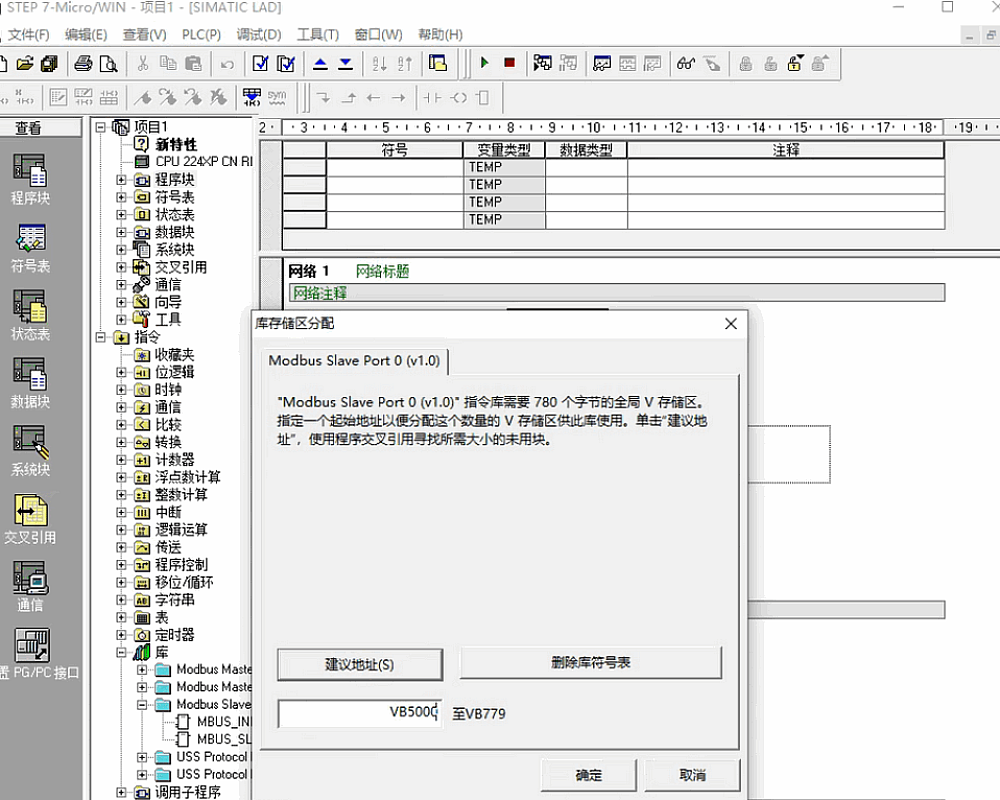
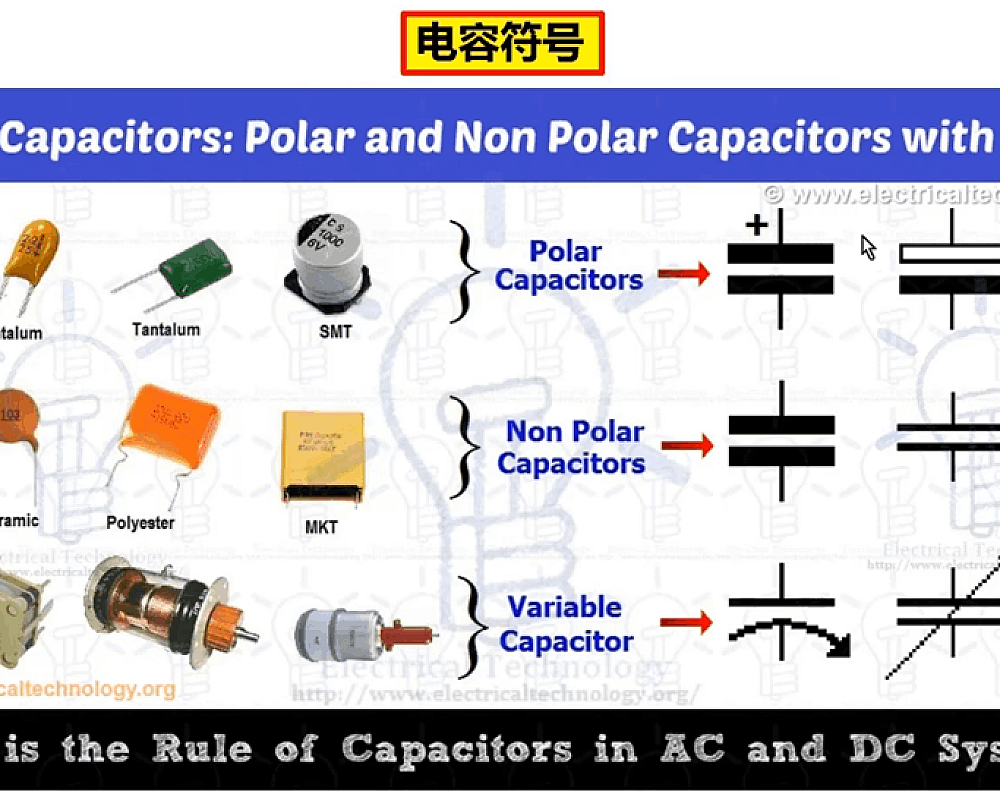
电路板上CPU芯片集成块与控制器芯片集成块【没程序】间的通讯一般采用的是SPI串口通讯。

两个CPU芯片之间的通讯【TXD—–RXD; RXD—-TXD】,时钟通过每个CPU上的晶振调一致到即可。如:晶振的频率是12M,通过软件调成2400波特率;

K线默认是12V,如果是0V可能是某一个CPU模块短路了,一个个拔插头只要不短路就对了。排除故障:K线不停的搭铁后快速断开,一直这样循环,然后用显波器测RXD引脚波形,如果跟手动搭铁同步;说明RXD引脚找到了,是直接通向CPU的。

如果是K线的话速率不能太慢,因为单线会有电感效应,速率不能超过20KB,线也不能太长。
CAN通讯工作示意图


CAN通讯芯片

CAN芯片与CPU连接示意图




Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Your article helped me a lot, is there any more related content? Thanks!
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.