无线遥控玩具车控制原理

遥控器部分是一块电路板
它有5个轻触开关分别是前、后、左、右、倒退,晶振是40.658Mhz;主控芯片是TX-2B
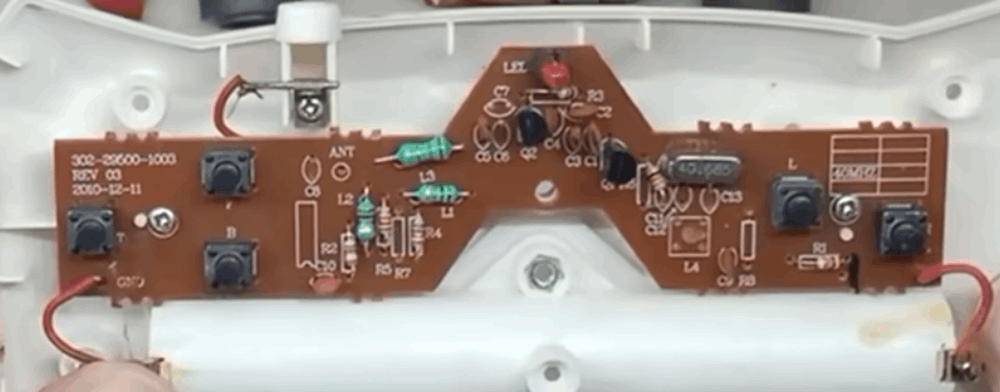
玩具车遥控器电路如下图所示:
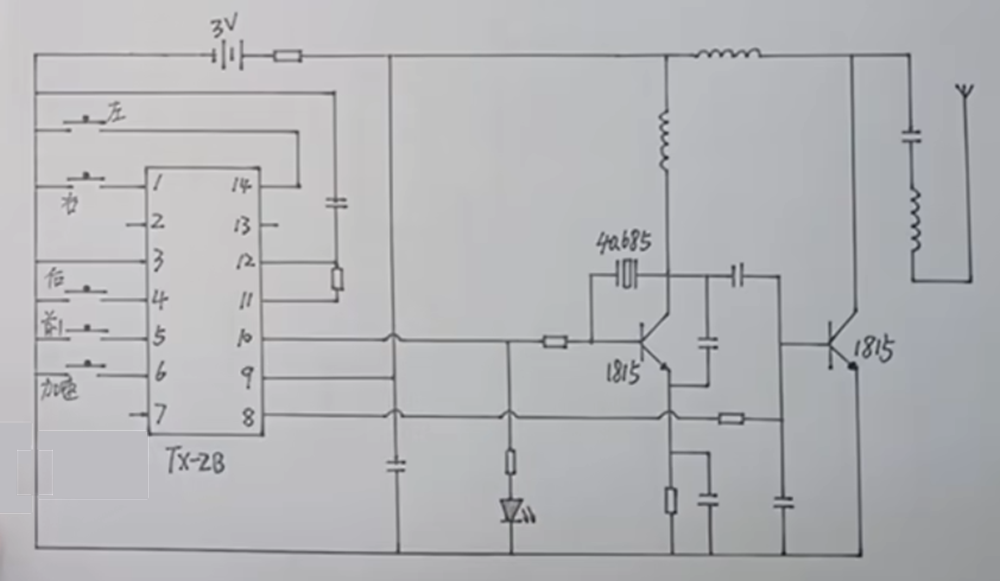
TX-2B芯片引脚功能表
| 引脚 | 符号 | 功能 |
|---|---|---|
| 1 | RIGHT | 右转 |
| 2 | TEST | 测试 |
| 3 | GND | 接地 |
| 4 | ACKWARD | 后退 |
| 5 | FORWARD | 前进 |
| 6 | TURBO | 加速 |
| 7 | SC | 带载波的编码信号输出,用于红外遥控 |
| 8 | SO | 不带载波的编码信号输出 |
| 9 | VDD | VDD给芯片供电 |
| 10 | PC | 电源控制输出端 |
| 11 | OSCO | 振荡器的输出,外接振荡电阻 |
| 12 | OSCI | 振荡器的输入,外接振荡电阻 |
| 13 | FOSC | 与2脚构成TEST信号 |
| 14 | LEFT | 左转 |
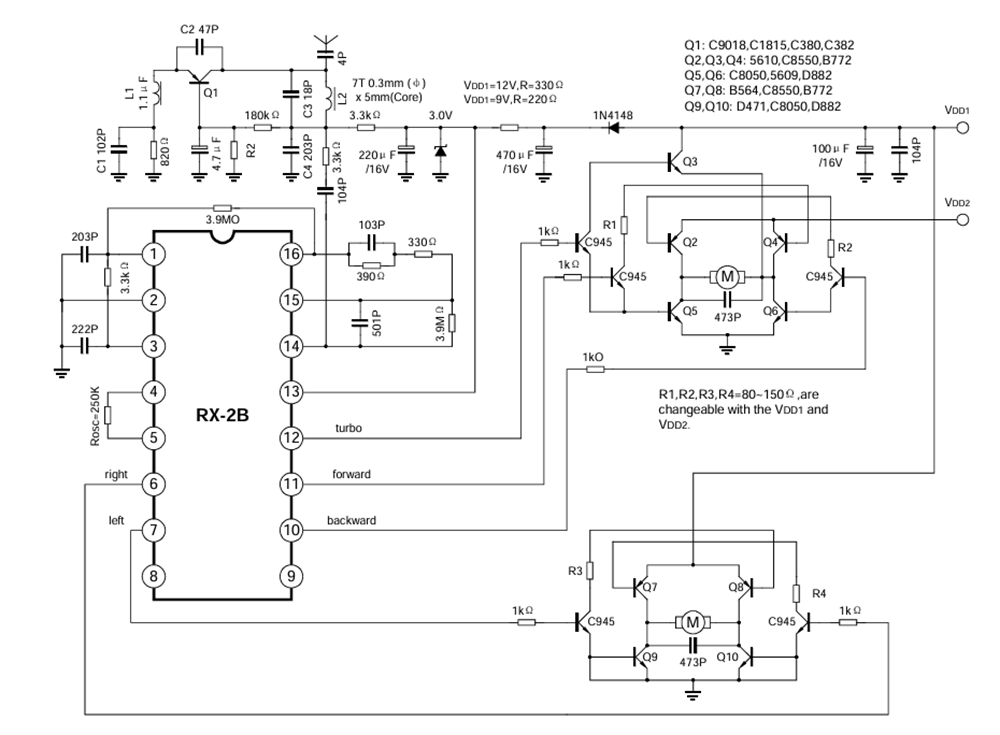
小车主板是贴片元件,RX-2B控制芯片,左右转弯控制电机及传动机构。还有一个前进、后退控制电机和差速传动机构。
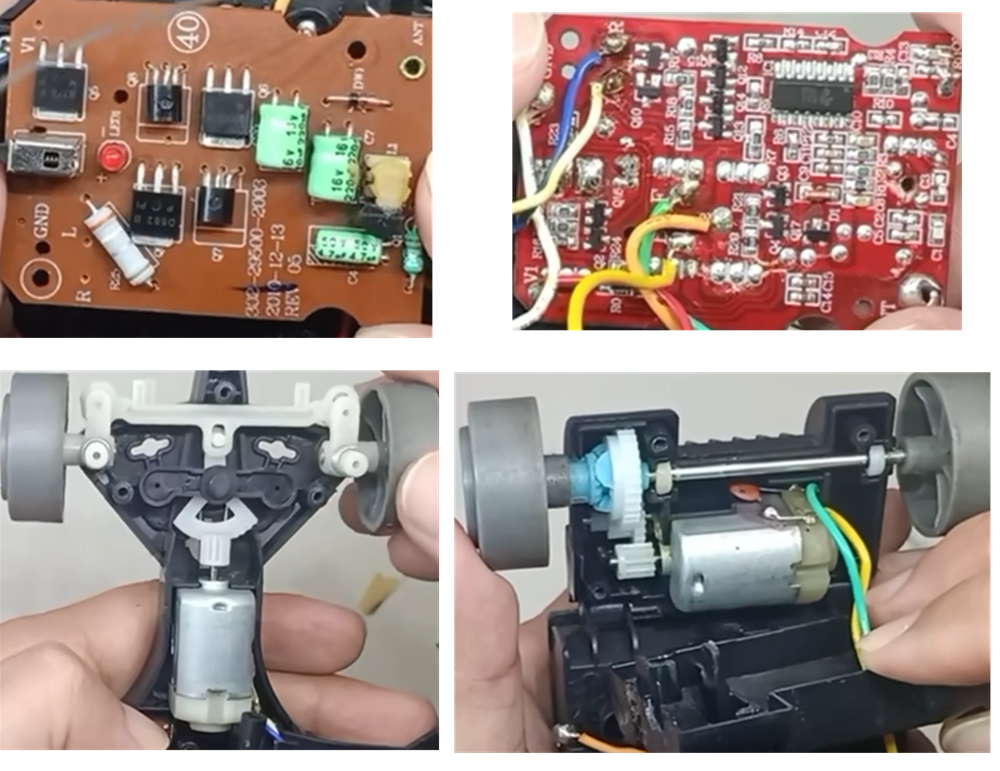
电路TX-2B/RX-2B组成的遥控发射与接收电路
RX-2B芯片引脚功能表
| 引脚 | 符号 | 功能 |
|---|---|---|
| 1 | VO2 | 反向器2输出 |
| 2 | GND | 接地 |
| 3 | SI | 编码信号输入端 |
| 4 | OSCI | 振荡器输入端,外接振荡电阻 |
| 5 | OSCO | 振荡器输出端,外接振荡电阻 |
| 6 | RIGHT | 右转 |
| 7 | LEFT | 左转 |
| 8 | ROB | 右转弯功能 |
| 9 | LDB | 左转弯功能 |
| 10 | BACKWARD | 后退 |
| 11 | FORWARD | 前进 |
| 12 | TURBO | 加速 |
| 13 | VDD | 给芯片供电 |
| 14 | VI1 | 反向器1输入 |
| 15 | VO1 | 反向器1输出 |
| 16 | VI2 | 反向器2输入 |
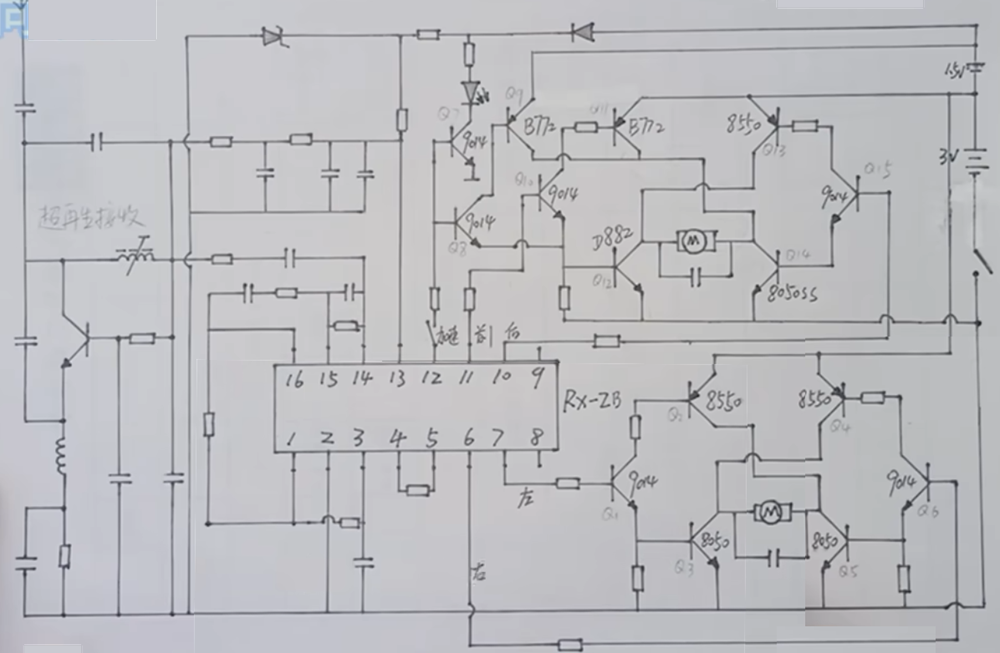
电机的控制是利用了H桥电路架构