PID算法与控制原理

PID算法原理
PID的调节,类似汽车快到十字路口,要提前减速是一个道理,便是具体提前多少秒的时间开始减速,不同的车性能,不同的车型提前的时间都不一样。这其中就有一个公式。

目标温度 – 当前温度 = 误差温度,也就是 SV – PV = e 这样不断的进行比较;
| 序号 | 时刻 | 误差 |
|---|---|---|
| 1 | t0 | SV0 – PV0 = e0 |
| 2 | t1 | SV1 – PV1 = e1 |
| 3 | t2 | SV2 – PV2 = e2 |
| 4 | t3 | SV3 – PV3 = e3 |
| 5 | t4 | SV4 – PV4 = e4 |
加热功率调节

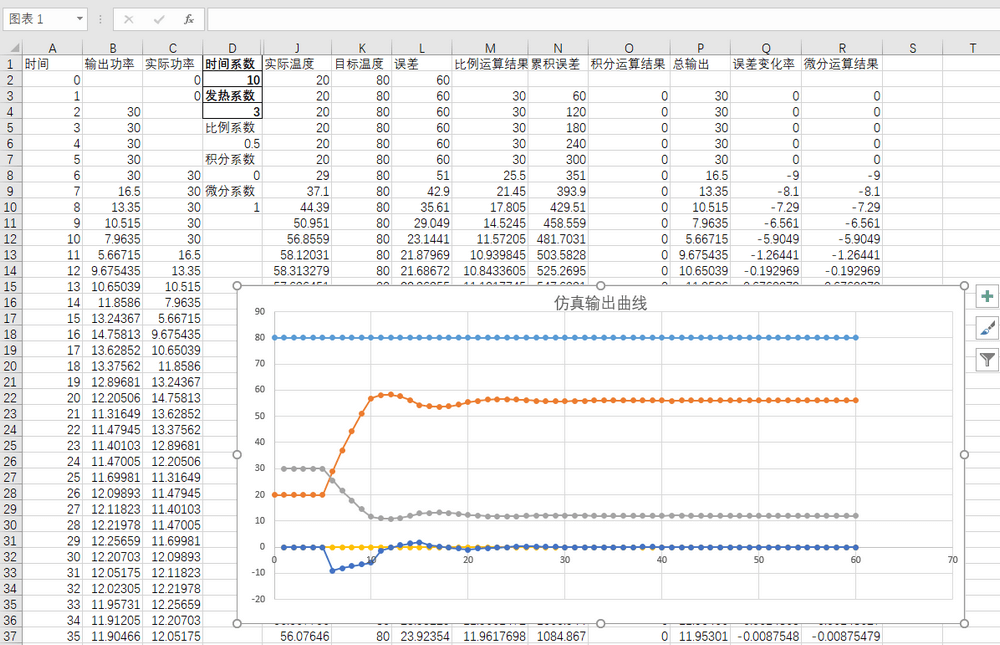
加热功率:50%类似点空比;时间系数:升到52度的话需要20秒 发热系数:类似加大发热芯的功率大小;

将运算结果的误差值给输入功率的下一个时刻。L4是运算结果的差值。此时到达60度左右就上不去了,需要改变比例系数都可以调到接近的值。

对输出的结果超过100的或小于0的进行过滤。

比例系数如果调大的话就会出现震荡。输出的控制是由比例运算结果给的,那比例运算结果又是由误差和比例系数相乘而来。
比例运算结果+积分运算结果=总输出,然后再把总输出给加热功率。

如果积分系数给的合适的话会先有一个正过充再有一个小点的负过充;再一个小点的正过充再一个更小点的负过充,这样趋于水平。

当积分系数是1时,如下图。超调量是最高值与目标值间的差值,如当前的107.93-80 约等于28那么它的时间是20;说明有超调的调的快;
当积分系数是0.8时,就没有超调现象,调解时间大约37,说明没有超调的调的慢,是各有长短。

如下图所示,积分调整合适的话,即没有超调现象,调解时间约20,调解的也比较快。这样的参数就比较合适了。

积分作用可以消除静态误差;使用积分作用容易出现超调;一般情况下比例加积分控制会比纯积分控制动态性能更好。比例加积分控制叫PI控制。
微分项是要从t1开始算起的,因为在e0之前是未知的,所以也认为是e0

改变微分系统可以缓解超调的幅度。
微分作用的输出曲线,在温度上升的过程也就是误差不断减小的过程中,微分是持续有输出的,是起作用。当没有什么误差以后它就不起作用了。它只在开始时有用,而且是负数,相当于给比例和积分一个减法。当加热曲线上面有很多类似小起伏的时候,说明微分系数调大了,改小一点即可。
微分作用可以抑制超调;微分作用过大会成为系统干扰;微分作用不能单独使用。
PID应用实操
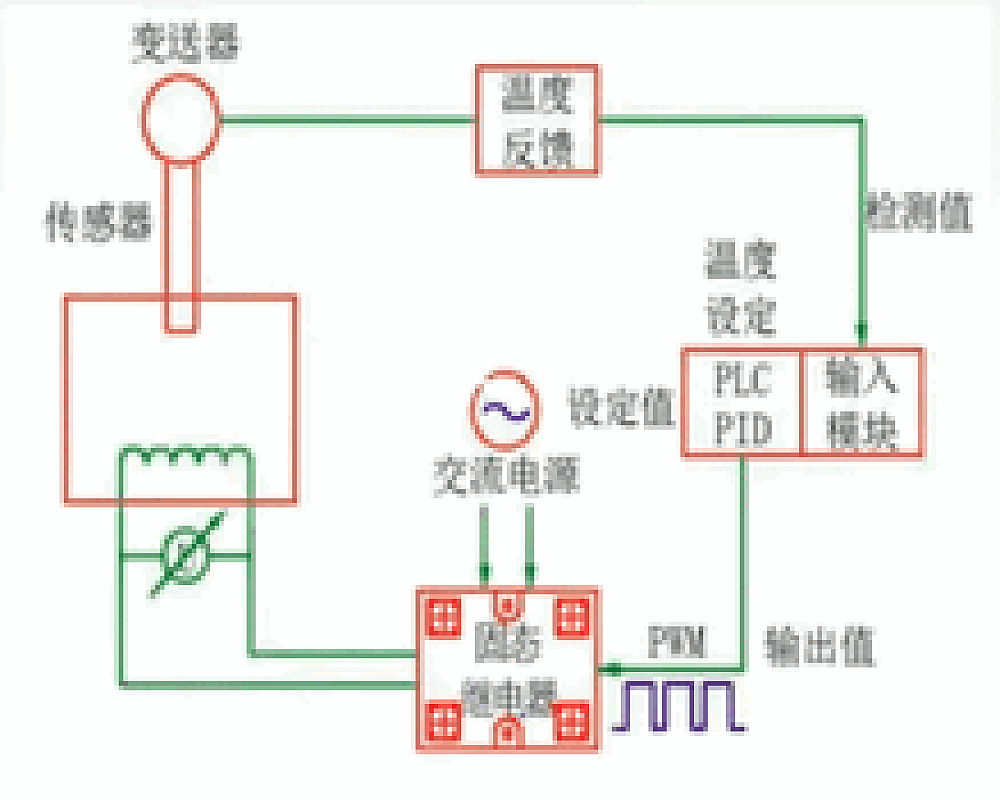
电路原理图

建立被控对象的发热模型。通过实验测量找到这个模型适合的发热系数,时间系数,以及延迟时间,阶跃法【给电吹风发热丝一个固定的加热功率】出风口温度不可能无限上升的,最后电吹风的散热功率和发热功率达到平衡的时候,出风口的温度就会停在一个稳态值上。
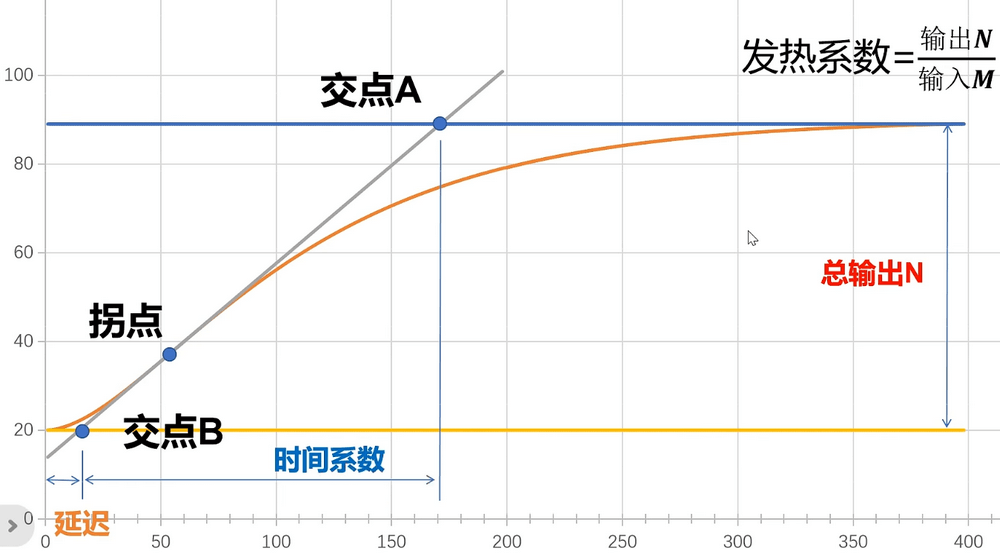
拐点:是温度变化最快的时刻,打开设备让其运行,当温度已经趋于平衡后,就可以停止了。

将这个温度的数据导出来,在线—-PLC读取—–软元件存储器【点详细进行勾选】—-执行


将读出来的数据导出到Excel表格中,这样便于操作。

在确保导出来的数据是数字格式的,否则的话在数据分析是会出问题的。