喷油、点火、步进等驱动电路

电感升压电路简化图

影响无效喷射时间和因素:1、电源电压;2、线圈的匝数;
喷油时间:主喷油时间*修正系数+无效喷射时间;
升压与喷油控制框图:通过12V或24V升压到46V或115V【减少无效喷射时间】
工作流程:【1】开启闭合、续流闭合、单缸闭合;高压开启后经6单缸线圈入地,此时喷油器送电工作;

【2】喷油器送电工作一瞬间后就断开了,就没有用了;此时续流的电就供上了给线圈供电了;如果线圈6电流过大此时续流管高速开关以减小电流达到开关稳压的目的;

【3】当油喷完以后续流管和单缸开关就都断开了,此进线圈6产生反向电动势,下正上负,则电流走向;电是从线圈6出去的也就要回到线圈6的负端构成回路;

场管的栅极加一个电阻可以抑制LC振荡,也会影响场管的开关速度。在1处是正常的矩形波,在2、3处是延迟的矩形波。
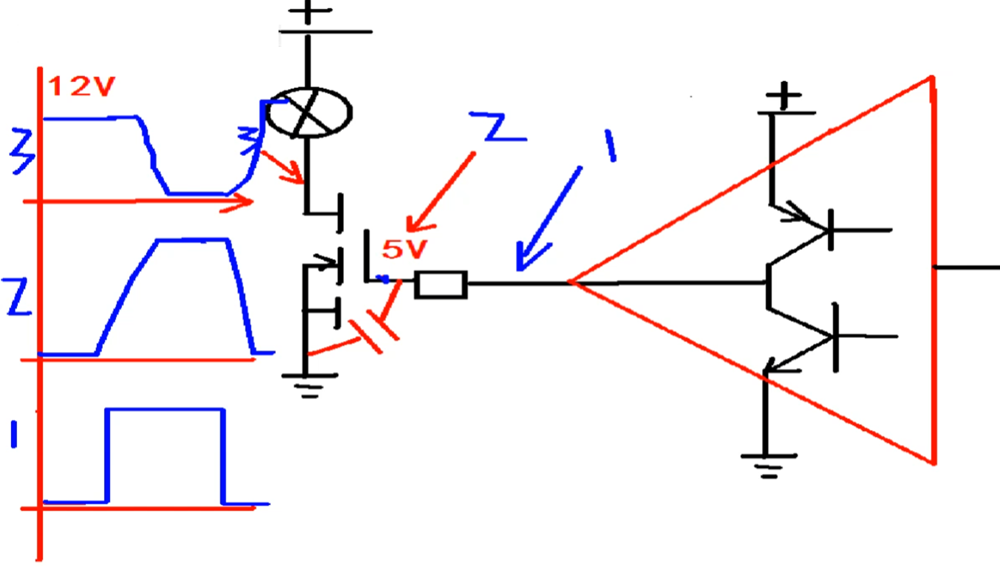
24V的升压到46V,并经电阻分压反馈和给AD信号,从场管的源极采集到运放经过一系列处理最终来控制场管的导通与否,栅极的控制是三角波,是由CPU时钟经分频【D触发器】后的方波再通过积分电路【阻容】转成三角波送到场管的栅极。

自举升压电路,在栅源之间加一个电容,初始阶段当开关闭合时栅极12V,源极0V这样有12V的压差场管导通,此时源极就有了20V的电压【如果漏极的供电更好的话可以到200V以上都可以】。而这20V的电压与电容的电压是串联关系,所以此时栅极就有了32V的电压,而源极20V电压还是导通的。由于GS之间是绝缘的,所以电容的电压没有能耗损失,所以此种自举应用较为普遍。另一种方法是在栅极加比漏极高5V以上的电压;

场管的栅极如果直接加载5V的电压再经防反二极管,这样加到GS间的电压就只有4.5V左右了,这样GS压差就有点低了,不能可靠开关。所以在栅极加一个2倍压电路就可以使GS间有个8.5V的压差了。这样就可靠开关了。不使用P沟道的场管主要是因为P沟道的型号少,内阻大等因素。所以使用较少。

喷油器高压开启电路,7.8V的电分两路一路是给自举电容充上正下负的到地构成回路充电,另一路经芯片内部开关到场管的栅极到达源极构成回路;自举电容是GS之间的电容,而且是上正下负,场管的工作是靠GS间的电容来供电的,还得有个隔离二极管。

当芯片内部的开关拔向接地端时,场管经放电电阻到地进行放电。场管的栅极加一个电阻可以消除LC振荡;

GS间的电容可以使场管的慢导通,GS间的电阻可以使场管的快速关断;当有高电平时,经线圈对地导通,在线圈上形成上正下负的电动势【红线】;当有低电平时,线圈会有下正上负的电压经二级管给电容充电,到达线圈的负极形成回路【蓝线】;线圈可以给电容充电所以通过反馈芯片就感应到了,升压电路就关闭了【黄线】,


汽油喷油器驱动有两种驱动方式:1、场管直接驱动;2、由专用驱动芯片驱动;喷油器动作速度愉,驱动信号都是一对一进行驱动,即一路信号对应一路输出。

汽油喷油器驱动TD62706 驱动芯片

汽油喷油器驱动TD62706其内部电路如下图所示,R1是发射极正向偏置电阻,R2是下拉电阻或关断电阻或发射节反向偏置电阻,R4是偏置电阻,R3是集电极负载电阻;

汽油喷油器驱动集成芯片,

点火线圈驱动电路,有点火线圈与点火驱动一体的;也有点火线圈和点火驱动分离的;都是有ECU给脉冲来驱动。点火线圈的驱动一般用IGBT【它是场管与三极管的合体】而达林顿管【它是两个或多个三极管的合体】
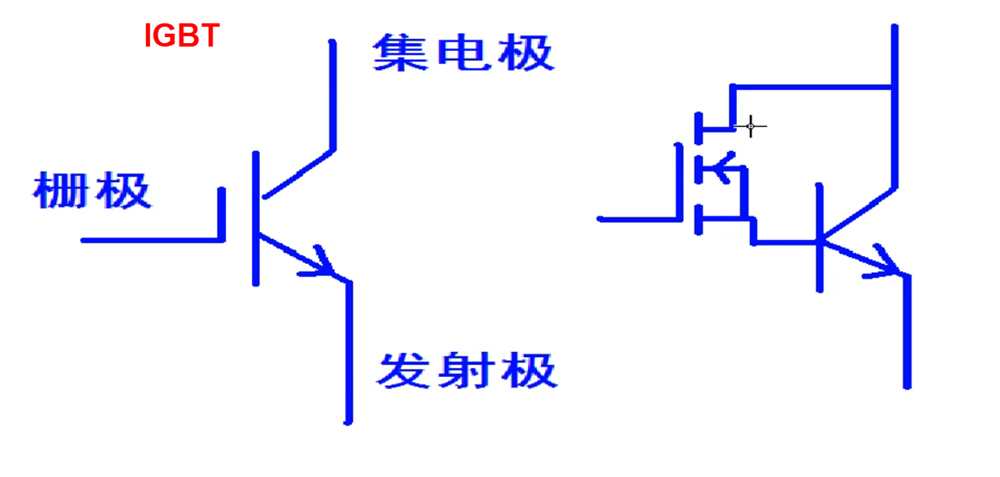
点火专用驱动芯片,内部集成了过压保护功能,当集电极的线圈关断时有反向电压经瞬态抑制管加到到栅极,这样IGBT管的C、E就导通了将反向高压卸掉,起到保护IGBT的作用。在IGBT的栅极对地也加了抑制管是防止线圈的反压倒罐到栅极输入端。此IGBT给信号就导通,不给信号就断开,因为它有R2放电电阻的存在。

点火线圈产生高频交变信号产生2000V以上的高压进行点火。

带有电流取样的点火线圈驱动电路,在驱动芯片有的内部有升压电压或放大电路。点火IGBT的发射极取样电阻两端会产生电压经电阻分压,最终进入芯片内进行放大;

帕萨特B5点火驱动电路,驱动芯片TLE4226,点火线圈和点火驱动一体;4万公里以后调一下火花塞,高压电路的电阻太大,调小间距;点火时在低转速时多次点火,高转速时一次点火。

汽车上的控制都是负极控制,因为如果是正极控制这样电路复杂,要加NPN的管子,而且负载的正极处严禁搭铁的,只要一搭铁就损坏三极管;而负端控制一来电路简单,二来就算搭铁也不会损坏三极管,所以比较安全。

芯片SPI通讯【时钟、发送、接收、片选】有四条线

PWM占空比可调控制器

555芯片各引脚定义说明:


步进电机的结构图

四线步进电机接线图,哪端接正S就跟随哪一端。

六线步进电机接线图,哪一端接地,S就跟随哪一端。

六线步进电机时序图

六线步进电机用5W试灯测好坏方法

步进电机的H桥驱动电路

H桥驱动的角形电机驱动有接法

场管的2、3脚分别为漏极和源极,在漏极和源极间有个体二极管,如果这个体二极管的正极在源极负极在漏极则为N沟道;否则为P沟道;所以不管是P沟道还是N沟道是以漏极二极管的极性命名的。场管的好坏测量、场管的好坏判断参考下图。


TLE4208G驱动芯片功能介绍

TLE4208G输入输出真值表

步进电机与伺服电机区别:步进电机是一步一步动作,就算通电也不动它是通过脉冲来控制转速;伺服电机是通电就一直动,是通过PWM占空比来控制转速的。

步进电机好坏判断:通过双向Led灯串一个电阻并在任一组绕组上如果LED交替闪烁说明是好的,每一组都用此法测量。如果任一路不闪烁应是H桥损坏了。

CH340G下载器【程序刷写器】电路图,用于单片机程序的上传与下载。每个厂家的CPU都有专用的刷写器和专用的刷写口。同一个厂家,不同型号的CPU刷写口是相同的。

示波器测量晶振用x10档进行测量。分离的H桥一般是大功率的,而小功率的一般是集成块就可以完成。
TLE5205芯片控制的电子节气门电路及传感器控制电路,输入输出真值表。Z表示高阻态,

TLE5205芯片故障诊断的控制原理,通过上拉和下拉电阻的分压再与差放进行比较从而得到可用于诊断的高低电平。

TC1508双通道直流马达驱动器,其中OUTA,OUTB是一组线圈,OUTC,OUTD是一组线圈

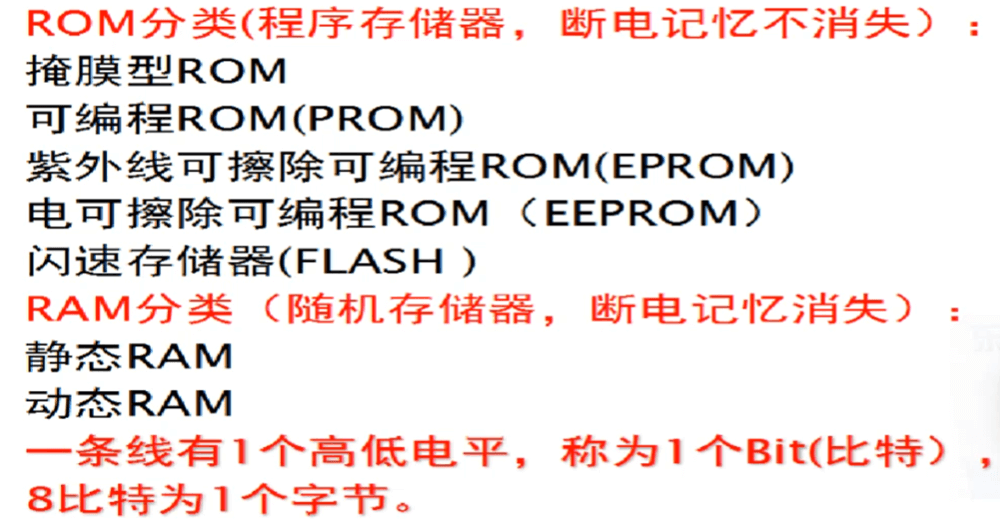
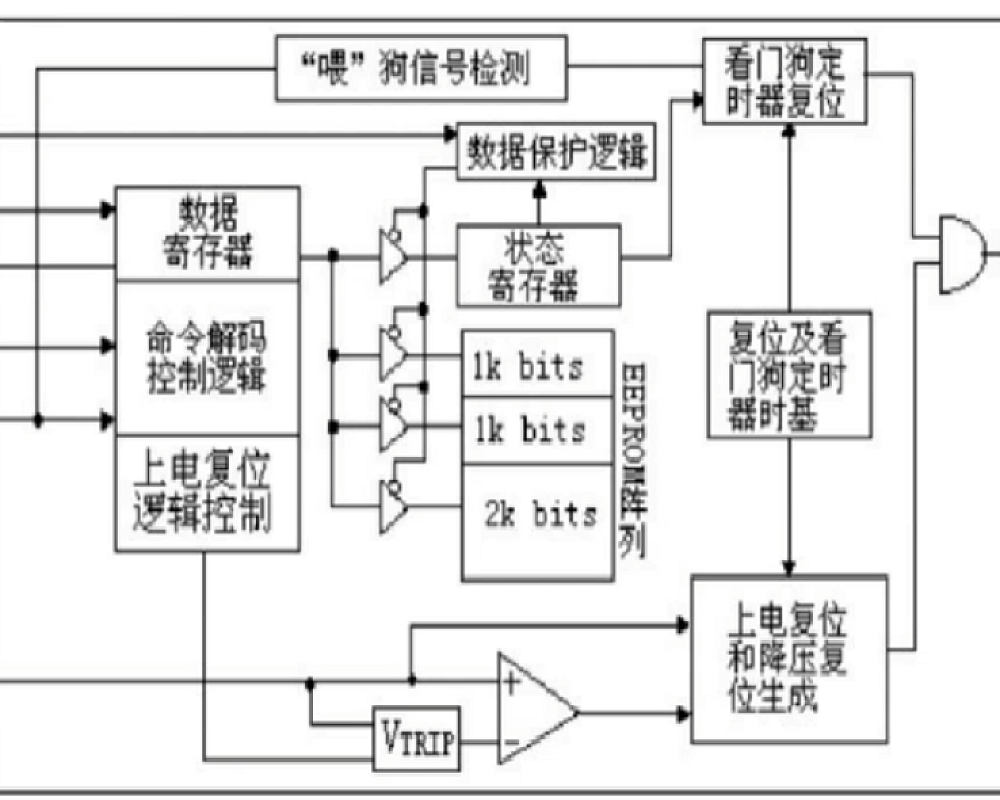
存储器的原理,ROM,RAM ,FLASH, PROM, EPROM,EEPROM概念的区别。
【蓝框中的1、2】说明进入电路板或芯片可能不止一根线,有两根或多根,可以万用表测量1、2是否导通,如果通说明有多路正极输入;D1是防止电源输入的反接,也就是接负极是不通的;R3是保险电阻;D2是瞬态抑制二极管,超压时导通释放高压;R1是下拉电阻当L1、L2由于某种原因并电了会将电能释放掉;D3、D4是续流二极管,当线圈关闭时D4经R2限流到线圈构成回路。

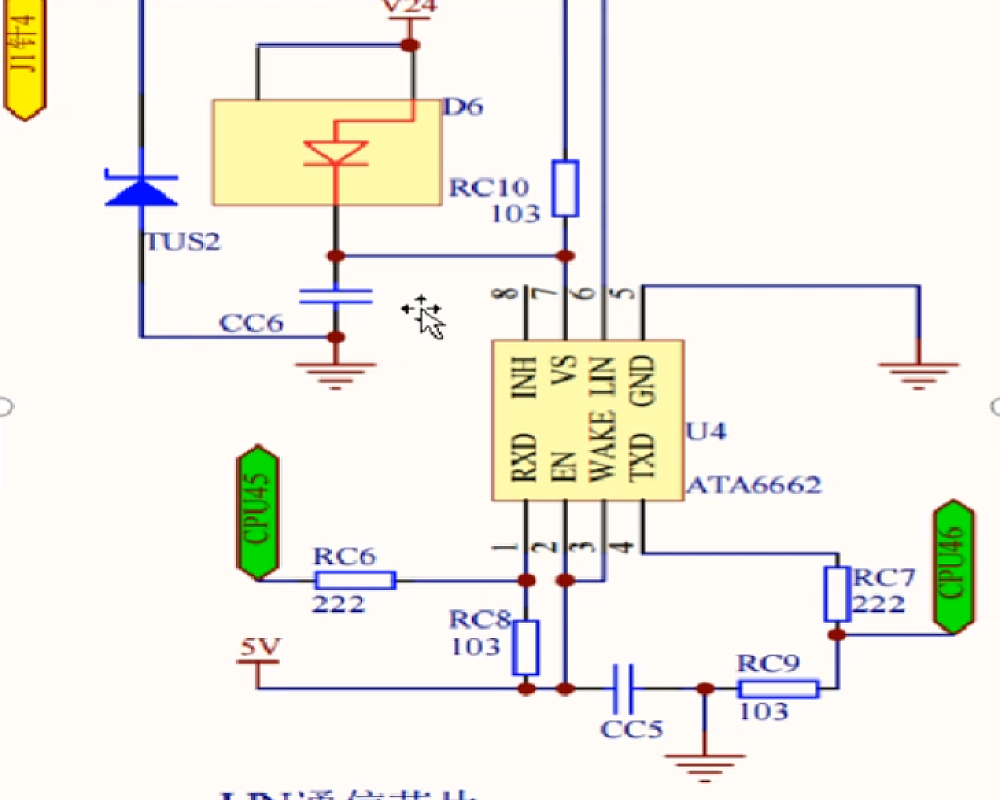
K/LIN电路的故障维修:K/LIN是低电平有效,它是由点火开关经二极管和电阻而来,通过瞬态抑制到地,再滤波就进入通讯接口芯片了。K/lin有11V左右的电压,可以对地不断的对地接通断开操作,此时在RXD,TXD就应有0到5V的脉冲了说明是好的。

CAN电路的故障维修:60R9终端电阻,CAN的每条线都安装有抑制二极管,然后通过共模线圈抗干扰。将can_h ,can_l 分别不停的通断12V和地,在RXD处有脉冲则为好的。没有脉冲则为坏的。

磁电式曲轴信号电路的故障维修:判断曲轴信号是否正常方法一:有一个继电器的线圈接在两个引脚上,然后用一个磁铁在线圈附近不停的上下移动【红框】,示波器就可以看到信号接口有方波输出为好的。

磁电式曲轴信号电路的故障维修:判断曲轴信号是否正常方法二:将220v 转12V的交流变压器的12v两个接头接在曲轴信号端,此时通交流电,示波器就可以看到信号接口有方波输出为好的。



Your article helped me a lot, is there any more related content? Thanks!
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
Thanks for sharing. I read many of your blog posts, cool, your blog is very good.
Kent casino Скачать на Андроид. https://www.pgyer.com/apk/apk/com.kent.c115546